Environment Mapping for Large-Scale Teleoperation
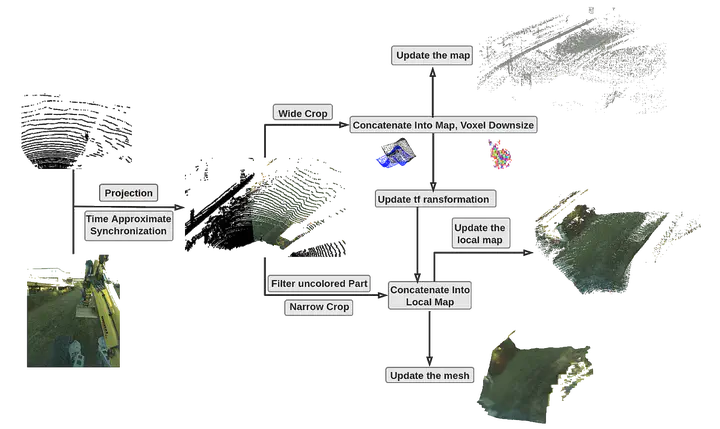 Volumetric Mapping Pipeline
Volumetric Mapping PipelineTeleoperation for large scale machinery is currently under development and most solutions rely on streaming high-quality raw images to the operator. However, there is no solution available that recovers the depth information which is one of the most important features for the human operator.
In this project, we propose a volumetric mapping pipeline by fusing real-time data from onboard camera and lidar, that creates a full 3D map around HEAP and renders a 3rd person view of the machine and its surroundings.
Yidan Gao
Master student in Mechanical Engineering
My research interests include SLAM, 3D reconstruction and robot perception.